在有限元,弹性力学和塑性力学的课上经常会听到弹塑性力学。
而在图形学领域貌似很少听到有人谈论弹塑性,大多数用的词是“粘弹性”。
甚至还有些地方,我看到有说“粘-弹-塑性介质”的。
既然弹性体是表现弹性,而塑形体则表现为流动。粘性体同样表现流动。两者到底有什么区别呢?或者说,什么时候该用哪个术语呢?
在有限元,弹性力学和塑性力学的课上经常会听到弹塑性力学。
而在图形学领域貌似很少听到有人谈论弹塑性,大多数用的词是“粘弹性”。
甚至还有些地方,我看到有说“粘-弹-塑性介质”的。
既然弹性体是表现弹性,而塑形体则表现为流动。粘性体同样表现流动。两者到底有什么区别呢?或者说,什么时候该用哪个术语呢?
我不是专家,但是我说一下我的理解哈。抛砖引玉。
弹性和塑性分别就是变形之后是否能够恢复原状,这个过程和时间无关。
而粘性的表现就是物体的形变,本构方程和时间也有关系。
感谢师兄的回复。这些天我旁听了一些塑性力学的课并且看了一些连续介质力学的书。我的总结如下:
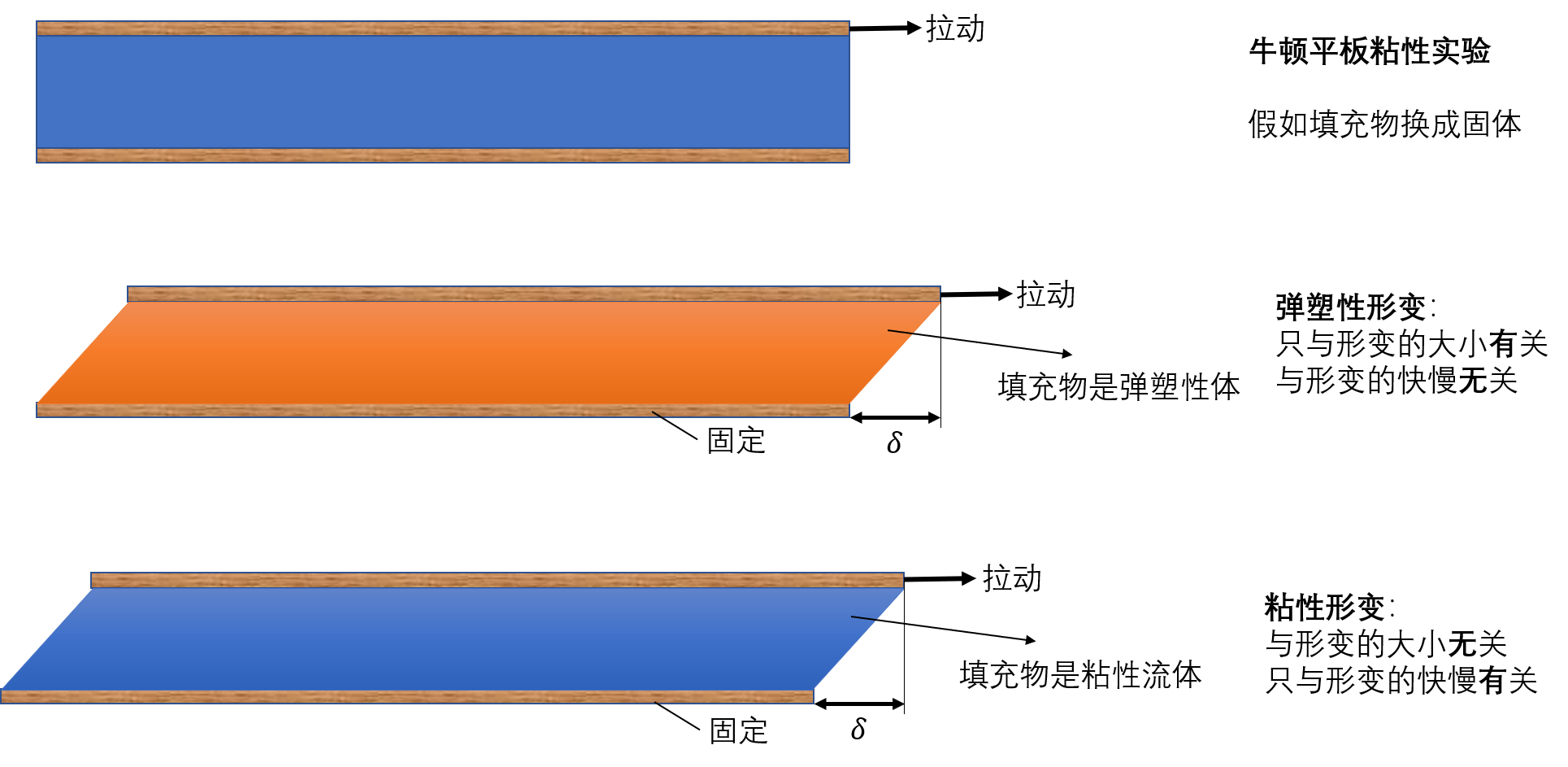
一句话:弹塑性力学的关注点是变形的多少, 而粘性关注的是变形的快慢。
弹塑性力与粘性力两者都是抵抗剪切变形的。但弹塑性力的大小是
由剪切变形(切应变)的大小决定的。而粘性力是由剪切变形的速率的大小(切
应变率)决定的。也就是后者比前者多了一个时间的导数。我们可以想象如下一
个实验。
不那么严谨地,如果我们仿照牛顿平板粘性实验:
在不同的问题中,关注点不一样:
假如我们是想研究一个大桥的变形,因为该变形是如此缓慢,以至于变形的快慢无关紧要了,但是变形的多少非常关键,因为一点点小的变形可能就会造成危险。
假如我们想研究飞机或者火箭与空气的摩擦。因为速度是如此之快(空气是静止的,而飞机在高速移动),所以变形的快慢非常关键,粘性力的影响也会非常之大。
一句话:前者(弹塑性)关注的是应变(即表示变形的多少),而后者关注的是应变率(即变形的快慢)
细说:
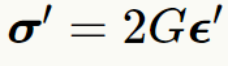
弹性应力中的剪切分量由广义胡克定律给出:
粘性力的本构由广义牛顿内摩擦定律给出:
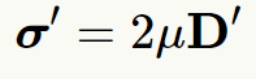
其中sigma’是应力偏量。mu是粘度。G是剪切模量。epsilon‘是应变偏量。D’是剪切应变率。
可见,两者的差别就在于剪切应变和剪切应变率!
我在之前的一个帖子里面问过一个问题: 固体拉梅参数mu和流体动力粘度mu是一回事吗? - 中文讨论区 - Taichi
剪切模量的单位:N/m^2(或者说是Pa)
动力粘度的单位:Ns/m^2(或者说是Pa s)
从这里就能看出一些端倪:两者的单位就差一个时间!
补充:
在连续介质力学之中,可以共同处理这三种力学性质。
显然任何真实材料都是共同拥有弹性、塑性和粘性这三种性质的
关键在于问题关注哪一方面。
那么,有没有把这三者结合起来的模型呢?
有的!
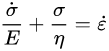
有一个模型,叫麦克斯韦模型(没错就是那个大名鼎鼎的麦克斯韦),它就是把粘性和弹性结合了起来!
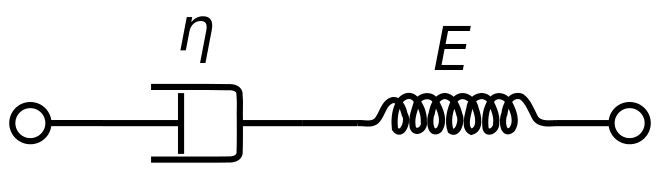
你看,滑块(或者叫粘壶)就代表粘性,弹簧就代表弹性。
写成公式就是这样的:
受麦克斯韦的启发,各路大神又发明了一大堆模型,基本就是组合来组合去
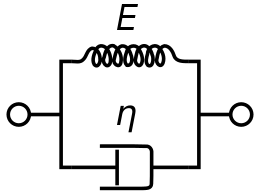
譬如开尔文-福格特模型(串联改成并联)
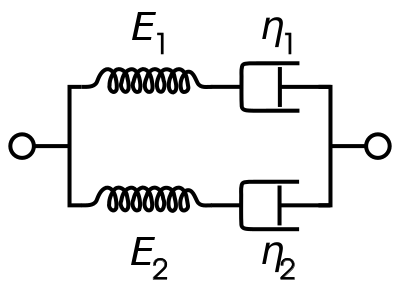
伯格斯模型(Burgers)
甚至可以弄得更复杂一点。
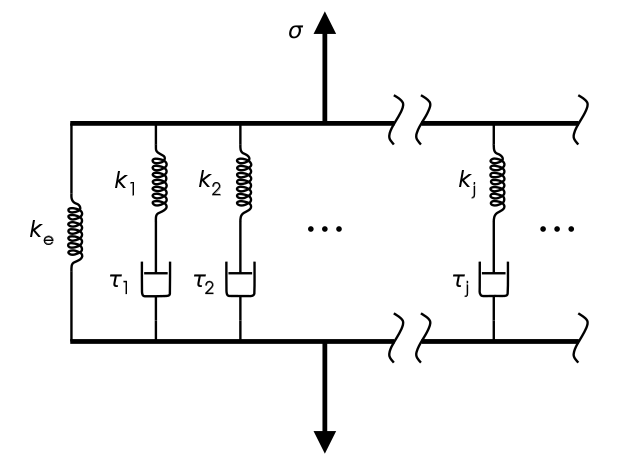
这样,粘弹性的问题就转化为了电路串并联的问题,即直观又简洁。
具体用什么,还是要看材料的哪种性质占主导