zane
#2
有意思,他们放出来的布料模拟的gif图效果不错,但是没有相关的源码。
1 个赞
布料仿真的示例在:
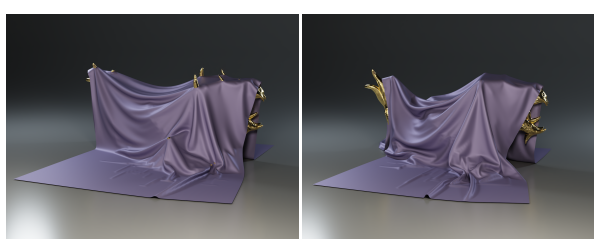
这个示例加载了nv_humanoid.xml文件,里面人物通过capsule胶囊体创建成sdf
这里我跑了一个和视频中的一样效果的示例(布料仿真跑崩溃了,待我去提个issue)
原理上应该是airMesh和sdfconact论文的实现,作者是Matthias Muller和Miles Macklin
另外关于布料仿真,Matthias Muller最近的视频阐述了如何减少布料自相交的技巧(虽然无法完全避免)
1 个赞
zane
#4
厉害了。之前没跑过humanoid这个。 Matthias Muller的十分钟物理那个系列看了,多年的经验总结出来的简单有效的模拟算法,收获挺多,自相交通过点-点碰撞来做,对于网格均匀(边长一致)的布料效果还是挺不错的。
1 个赞
zane
#5
跑了一下humanoid这个示例,就是一个胶囊体的人的刚体仿真,不是布料模拟。
骚瑞,这个示例打不开,误导你了。
表达欲有点强,见谅  那就只能看看作者的论文咯,
那就只能看看作者的论文咯,
他在GTC的教程里,有提到这个布料仿真使用了这个研究成果,大致就是如何迭代求解精确找到
一个点到某个sdf的最近点,他还在shadertoy上写了个示例,
这样就可以实现精确碰撞了。
关于如何实现sdf之类的,我现在还在研究中,后面有时间我会用taichi写个demo
孤陋寡闻了,Fenics是一门语言还是插件呀?
我查了一下,项目是这个吗?
看起来是有限元仿真的,FE两个首字母瞬间想到FEM
打开项目首页,看起来又像解决偏微分方程的工具包?因为我看它底层依赖某些BLAS(Basic Linear Algebra Subprograms)线性代数组件
 能介绍一下下不,很感兴趣!!!
能介绍一下下不,很感兴趣!!!
1 个赞